动态规划入门指北
从搜索的优化说起
考虑这样题目:
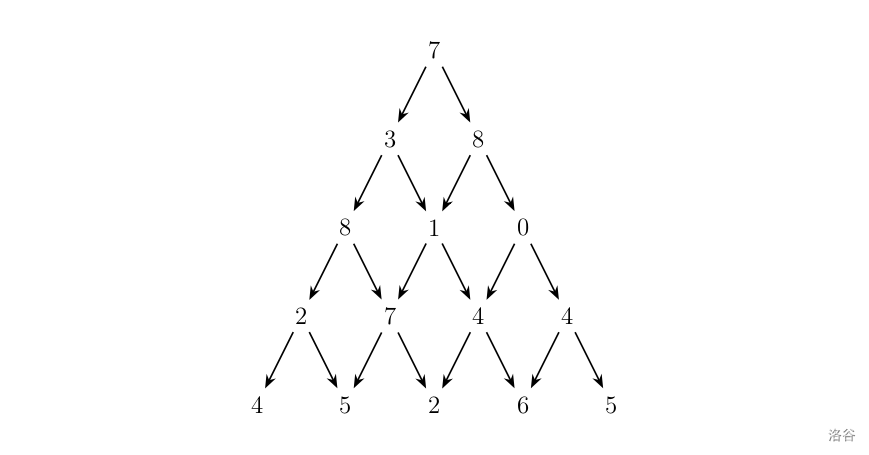
>写一个程序来查找从最高点到底部任意处结束的路径,使路径经过数字的和最大。每一步可以走到左下方的点也可以到达右下方的点。
显然,我们可以从顶端开始,枚举每一条路径,求出其中的最大值。我们注意到,如果有一条路径可以到达某个点,之前的路径并不会影响之后走的路径。
举个例子:假如通过
因此,此时到达
所以,到达每个点的最优解只和到达上一个点的最优解有关。所以刚刚的搜索算法多了许多无效搜索。因为每个点的前面一个点只有两种可能(左和右两个点,最优解记作
动态规划简介
接下来更加详细的介绍动态规划算法。
概念解释
- 在上面的例子中,求出
要先求出 和 。我们将求出 称为 的”子问题“,通常,子问题是一个数据规模更小的相同问题。
- 在上文中,我们用点上的数字来描述一个问题,比如“到编号为
的点的最有解”,但实际上可能会优重复,而且查找并不方便。因此我们可以用行号列号来描述一个问题。比如“到第 行第 个点的最优解”。像这样描述一个子问题,叫做“状态”。
- 在上面的例子中,我们按照行号枚举每个点。在这里,我们将一行的点分为一类,从上到下枚举。其中一类被称为动态规划的阶段,设计阶段时要保证,在解决一个问题前,要保证问题的所有子问题都被正确解决。
- 上文的
描述了如何从一个状态的到下一个状态(从子问题的最优解推导出问题的最优解),被称为“状态转移方程”。
接下来考虑动态规划要满足的条件:
最优子结构
所谓最优子结构,是指以下两点
- 到达每个状态前做出的决策并不会影响之后做出的决策(对应上文如果有一条路径可以到达某个点,之前的路径并不会影响之后走的路径)
- 问题的最优解一定来自于子问题的最优解(对应上文到达每个点的最优解只和到达上一个点的最优解有关)
无后效性
无后效性是指,一个子问题的答案只依赖于在它之前解决子问题,不会受在它之后解决的子问题的影响。
在开头的例子中,经过了一个点是不能往回走到,因此满足无后效性。
重叠子问题
重叠子问题是指,要解决多个问题往往依赖于一些相同的子问题。比如开头的例子中,求第
和其他算法的关系
分治
DP可以看作是一种分治算法,将一个问题分解成多个子问题,当子问题足够容易解决时解决掉这些子问题,再用状态转移方程得到问题答案。
分治算法通常用递归来实现,我们也可以写出DP的递归写法(以开头的数字三角形为例):
1
2
3
4
5int slove(int i,int j){
if(dp[i][j]!=0)return dp[i][j];
if(i==1)return dp[i][j]=arr[i][j];
else return dp[i][j]=max(slove(i-1,j-1),slove(i-1,j))+arr[i][j];
}
递推
实际上,按阶段枚举每个点和递推也很是相似,都是通过子问题的解推出问题的解。
1
2
3
4
5
6
7dp[1][1]=arr[1][1];
for(int i=1;i<=r;i++){
for(int j=1;j<=i;j++){
dp[i+1][j]=max(dp[i+1][j],dp[i][j]+arr[i+1][j]);
dp[i+1][j+1]=max(dp[i+1][j+1],dp[i][j]+arr[i+1][j+1]);
}
}1
2
3
4
5 for(int i=1;i<=r;i++){
for(int j=1;j<=i;j++){
dp[i][j]=max(dp[i-1][j-1],dp[i-1][j])+arr[i][j];
}
}
实际上不难发现,递归写法和递推的第二种写法是从问题的角度出发,而递归的第一种写法是从子问题推导出问题的解的角度出发的。
图论
DP与图论关系很大,图论中的Floyd算法和Dijkstra算法都采用的DP的思想。
实际上,如果将状态看作图上的点,将状态之间的关系看作边,那么DP实际上就是再一张图上用BFS跑最短路/最长路。BFS第一次访问的节点(第一层)就是DP的第一阶段。以次类推。
由于DP的特性无后效性,所以图中显然没有环,因此这个算法是正确的。 这也引出了有后效性的一个常见做法:利用SPFA算法的迭代思想,多次迭代到某个状态的最优解。